● CAR · ID-04 · 847 frames
● PEDESTRIAN · ID-07 · 312 frames
● BUS · ID-02 · 1,204 frames
● TWO-WHEELER · ID-11 · 526 frames
▼ OBJECT TRACKING TIMELINE
CAR-04
PED-07
BUS-02
MOT-11
0:00
2:16
4:32 ▶
✓ 23 OBJECTS · 4,832 FRAMES · QA PASS
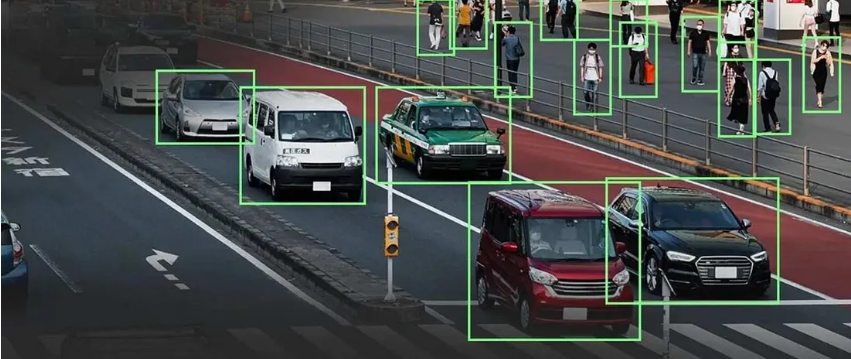
What It Is
Object tracking with consistent identity across frames
Video annotation extends image annotation into the temporal dimension. The core challenge is not just labeling what is in each frame it is maintaining label consistency across frames as objects move, overlap, partially leave frame, and re-enter. Getting this right requires a combination of smart automated tracking and careful human review of edge cases that break automated tracking.
Get a Free Audit →